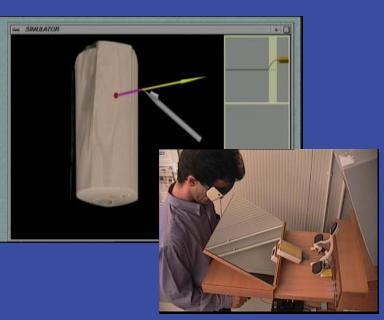
We have developed an experimental catheter insertion simulation system supporting head-tracked stereoscopic viewing of volumetric anatomic reconstructions registered with direct haptic 3D interaction. The system takes as input data acquired with standard medical imaging modalities and regards it as a visual and haptic environment whose parameters are interactively defined using look-up tables. The system's display, positioned like a surgical table, provide a realistic impression of looking down at the patient. Measuring head motion via a six degrees-of-freedom head tracker, good positions to observe the anatomy and identify the catheter insertion point are quickly established with simple head motion. By generating appropriate stereoscopic images and co-registering physical and virtual spaces beforehand, volumes appear at fixed physical positions and it is possible to control catheter insertion via direct interaction with a PHANToM haptic device. During the insertion procedure, the system provides perception of the effort of penetration and deviation inside the traversed tissues. Semi-transparent volumetric rendering augments the sensory feedback with the visual indication of the inserted catheter position inside the body.
The multimedia works listed here are included as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.

 crs4.it
crs4.it